In Progress
MIMIC — Capstone Project
Sep 2025 — Present
A Concordia-McGill collaboration building bimanual mobile robots for imitation learning research — from low-cost prototypes to industrial Kinova arms.
RoboticsImitation LearningVLA Models+5
Autonomous Bimanual Handover Using VLA model on LeRobot Framework — Mimic Robotics Capstone Project


“I'm obsessed with autonomous robotics where embedded control systems meet modern AI. From writing hardware drivers & sensor fusion to training VLA models, I'm passionate about building robots for the real world.”
Selected work in robotics, embedded systems, and software.
Sep 2025 — Present
A Concordia-McGill collaboration building bimanual mobile robots for imitation learning research — from low-cost prototypes to industrial Kinova arms.
Oct 2025 — Dec 2025
Implemented Extended Kalman Filter for sensor fusion, combining IMU and GNSS data for accurate vehicle position estimation.
Oct 2025 — Dec 2025
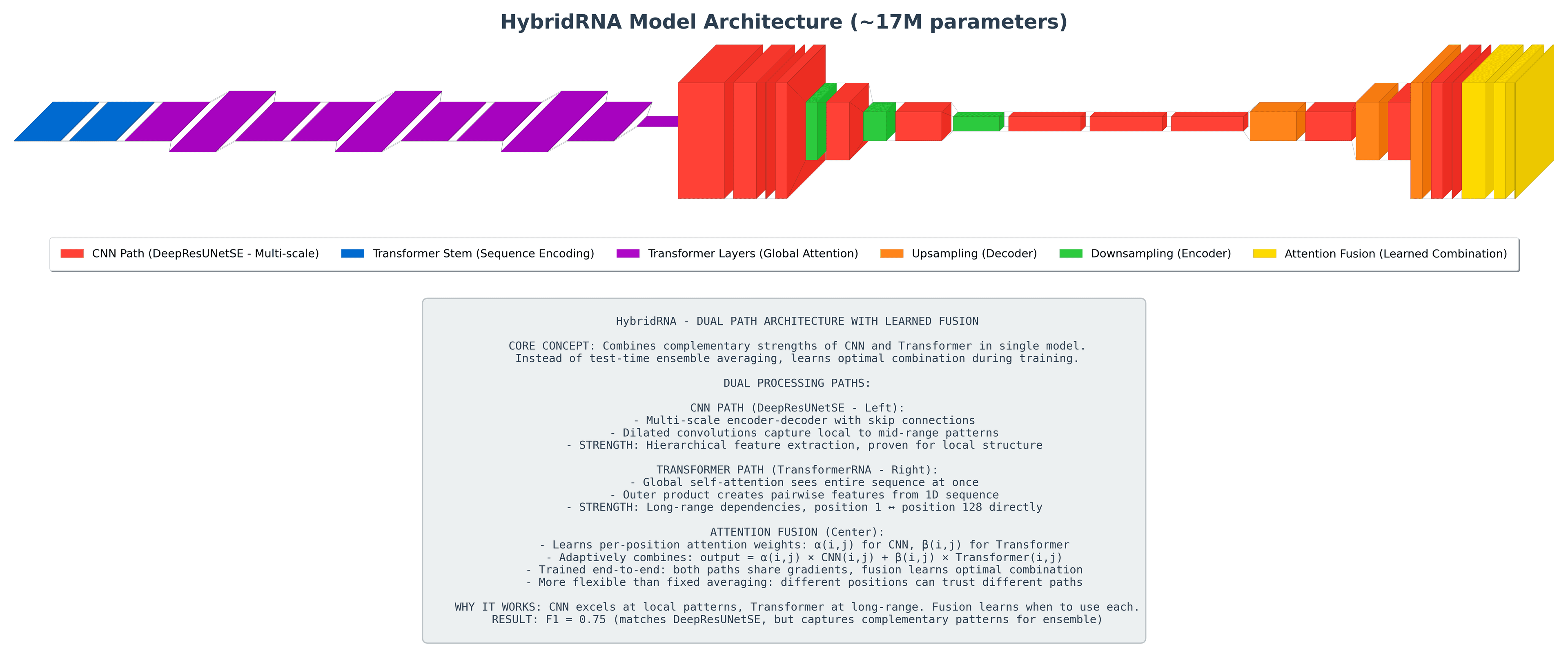
Built a DeepResUNet-Transformer hybrid from scratch, achieving the highest F1 score in a class of PhD and Master's students.
May 2025 — Jul 2025
A summer project into imitation learning, VLA models, and the Hugging Face robotics ecosystem — learning how to make robots learn from demonstration.
Jan 2025 — May 2025
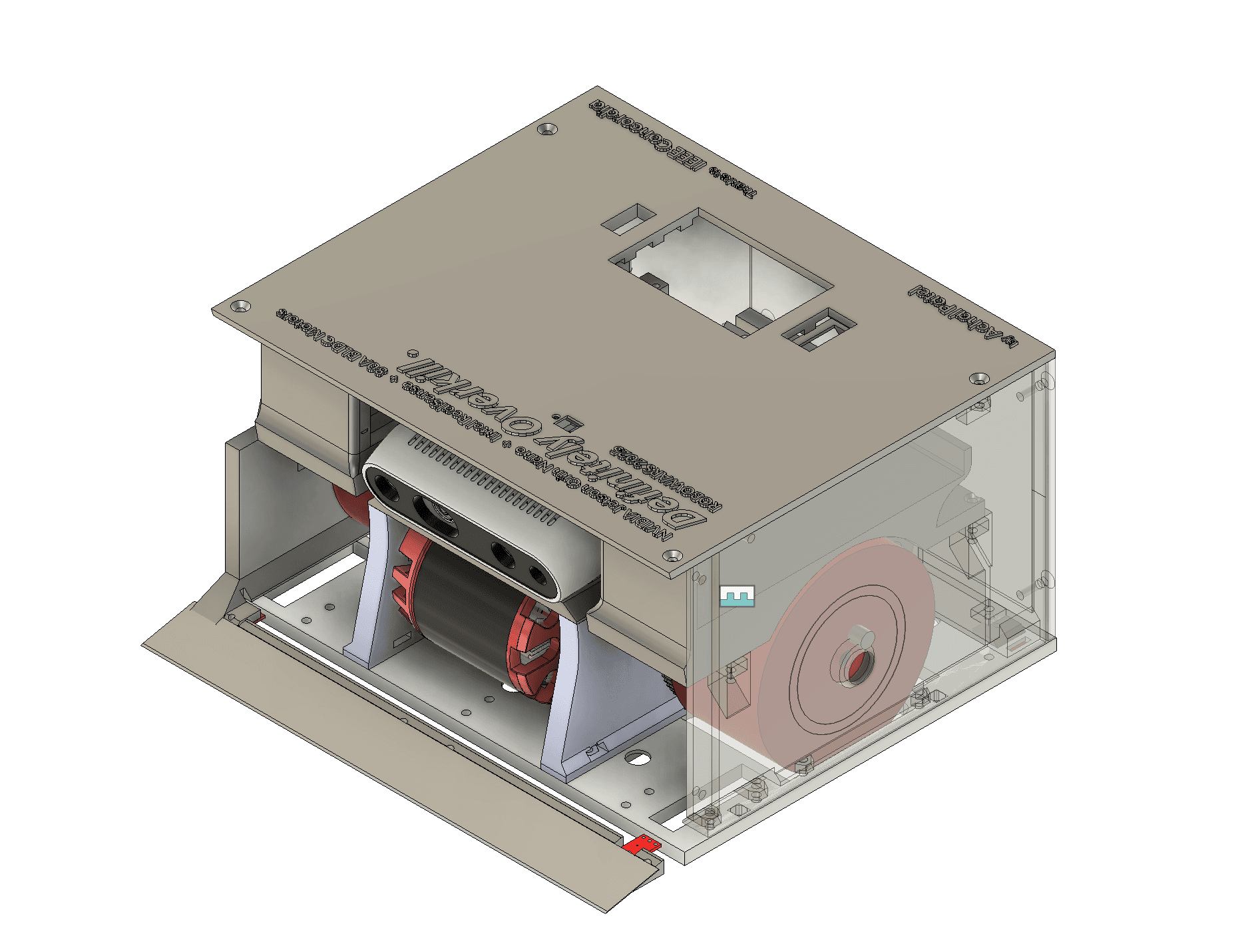
A sumo robot that's exactly what the name says — Jetson Orin Nano, Intel RealSense depth camera, YOLO inference, and brushless motors. Because why not?
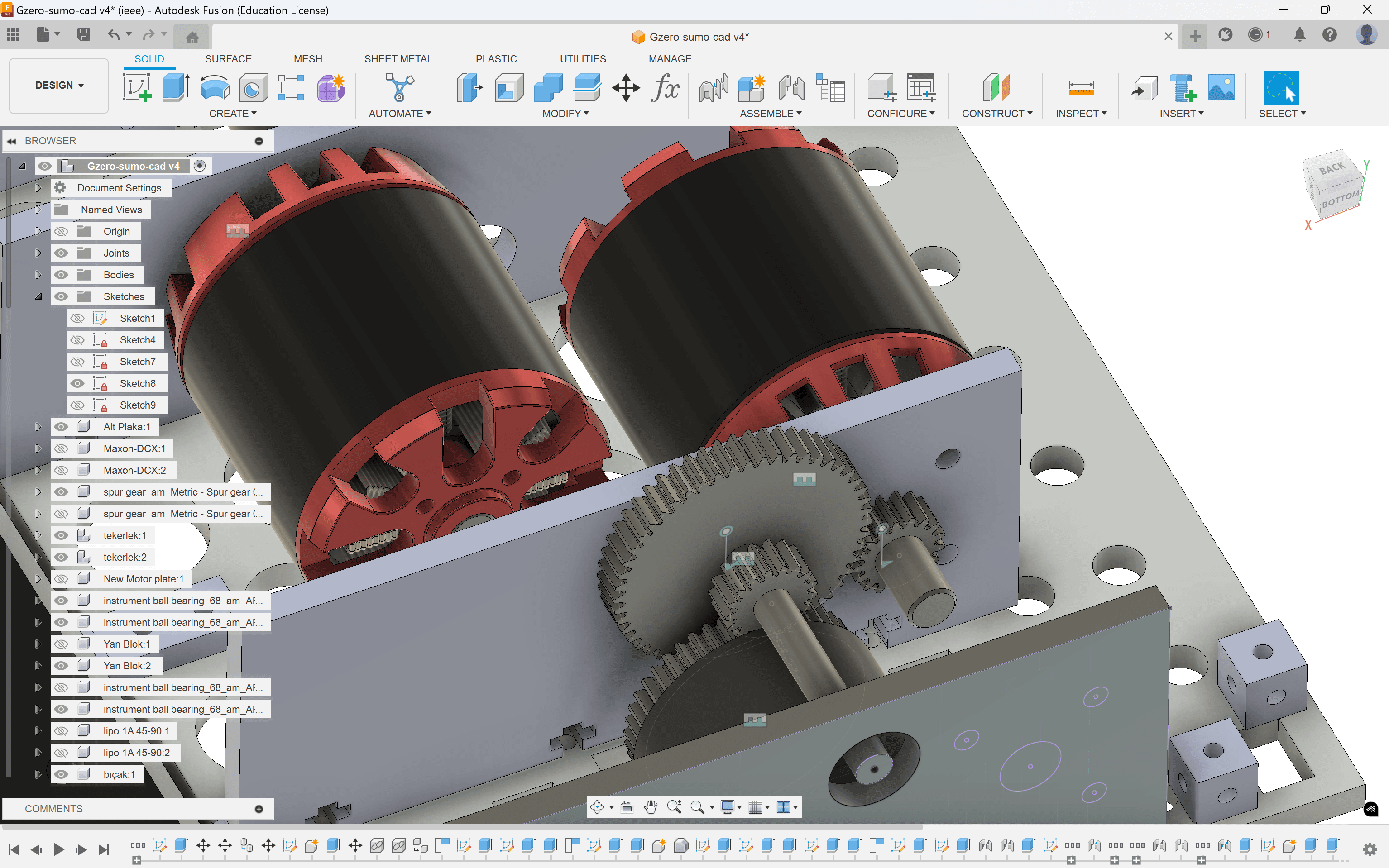
Nov 2024 — May 2025
The sequel to my first sumo robot — upgraded with brushless motors, Teensy 4.0, ToF sensors, and proper state machine architecture.
Professional experience in robotics, embedded systems, and engineering.


